|
|
Publications
>
Voser 1996 - Geometrische Anforderungen beim Datenaustausch
|
 back
next
back
next 
|
|
|
|
|
Voser, Stefan A. 1996
Anforderungen an die Geometrie zur
gemeinsamen Nutzung
unterschiedlicher Datenquellen,
4. deutsche Arc/Info-Anwender-Konferenz, März 1996, Freising.
S. 209-217, 9 Seiten, 4 Abb + 6 Tabellen
Abstract
Raumbezogene Daten bilden die Basis eines Geographischen-Informationssystems
(GIS). Deren
originäre Erfassung ist sehr aufwendig und teuer. Sie basiert i.A. auf unterschiedlichen
Datenquellen und Felderhebungen. Sollen fremde Daten genutzt werden, müssen verschiedene
Bedingungen eingehalten werden. Auf konzeptioneller Ebene sind dies Übereinstimmung in
geometrischer und thematischer Modellbildung.
Zu den geometrischen Anforderungen gehören die Übereinstimmung
in der geometrischen
Modellierung wie Maßstab und geometrische Auflösung sowie in den Qualitätsmerkmalen
wie
Genauigkeit. Die erste Voraussetzung, welche erfüllt sein muß, um unterschiedliche
Datenquellen gemeinsam darzustellen, sind einheitliche geodätische Grundlagen. Der Raumbezug
wird mathematisch durch Koordinaten hergestellt. Die Koordinaten sind abhängig von
unterschiedlichen Bezugsflächen, deren Lagerung sowie den unterschiedlichen geometrischen
Eigenschaften von Kartenprojektionen. Sollen Daten aus unterschiedlichen Bezugssystemen
zusammengeführt werden, müssen die Koordinaten zwischen den Systemen transformiert werden.
Im folgenden werden die wesentlichen geodätischen Grundlagen zusammenfassend
dargestellt und
ein Konzept zum Koordinatenmanagement vorgestellt. |
|
Die grundlegende Voraussetzung für den Nutzen von Geographischen Informationssystemen
(GIS)
ist erfüllt, wenn die richtigen Informationen zur Bearbeitung und Analyse vorliegen. In vielen Fällen
ist man dabei auf Fremddaten angewiesen. Topographische Informationen werden als Grundlagen
benötigt, um die eigens erhobenen Daten darin einzupassen. Amtliche Daten oder kommerzielle
Datensätze werden für Analysen und Abfragen benötigt.
Zur Übernahme von Fremddaten müssen auf konzeptioneller Seite Geometrie und Thematik
mit
den eigenen Bedürfnissen übereinstimmen [Voser 95a]. Auf technischer Seite muß bei digitalen
Daten das Austauschformat definiert sein. Auf organisatorischer Ebene sind die Arbeitsprozesse
zur Einbindung in die eigene Anwendung und die Aufbereitung der Daten festzulegen. Die
Schwierigkeit liegt in der Entscheidung, welche Geodaten in ihrer Charakteristik am Besten mit
den eigenen Bedürfnissen übereinstimmen. Entscheidungen sind nur möglich, wenn
Metainformationen über die zur Auswahl stehenden Datensätze vorliegen und möglicherweise
Testdaten zur Verfügung stehen. |
|
Es gibt eine Vielzahl geometrischer Anforderungen an die Daten, welche erfüllt sein
sollten, damit
eine Übernahme in Betracht gezogen werden kann. Es folgt eine Zusammenstellung geometrischer
Gesichtspunkte, die bei der Evaluation von Geodaten zu überprüfen sind:
- geographischer Raum
- räumliche Ausdehnung
- räumliche Dimension (2D oder 3D)
- geodätisches Bezugssystem
- Kartenprojektion
- Maßstab
- geometrische Repräsentation
- geometrische Auflösung / Mindestgrößen
- geometrische Genauigkeit
- analog/digital
- Vektor-/ Rasterdarstellung.
Jede Anwendung ist an einen geographischen Raum und die damit verbundene räumliche
Ausdehnung geknüpft. Es stellt sich auch die Frage über die Form des Gebietes (Inselkarte oder
Rahmenkarte). Die räumliche Dimension richtet sich danach, ob nur Lageinformationen (2-
dimensional) genügen, ob die Höhe durch ein Geländemodell (21/2-dimensional) repräsentiert
werden kann oder ob volle 3- dimensionale Ausprägung vorhanden sein muß. Das geodätische
Bezugssystem liefert die mathematische und geometrische Grundlage, d. h. das Gerüst, in
welchem die Geodaten beschrieben werden.
Ein entscheidendes geometrisches Charakteristikum einzelner Datenbestände ist der
Maßstab, für
den die Geodaten konzipiert worden sind. Der Maßstab beeinflußt die geometrische Auflösung, die
Mindestgröße von Objekten, die damit verknüpfte geometrische Repräsentation (punkt-, linien-,
oder flächenhaft) als unterschiedliche geometrische Primitive desselben Objektes. Die
geometrische Genauigkeit ist ein Maß zur Beschreibung der Lagetreue eines Objektes.Der
Umstand, ob ein Datenbestand analog oder digital vorliegt, entscheidet über die Methoden, mit
denen die Daten in die eigene Anwendung integriert werden können. |
|
Ein Großteil von Geodaten liegt in der traditionellen 2-dimensionalen Lagedarstellung
vor. Es erfolgt
nun eine Zusammenstellung grundlegender Begriffe und Arbeitsschritte bei der Reduktion und
Abbildung der Erdoberfläche in die Ebene unter Verwendung von geodätischen Bezugssystemen
mit dem zugehörigen geodätischen Datum und Kartenprojektion.
Die Mehrzahl der raumbezogenen Phänomene, welche mit Hilfe von GIS bearbeitet werden,
befinden sich an der Erdoberfläche, oder sind Bestandteile der Erdkruste oder der Atmosphäre und
grenzen an die Erdoberfläche. Das Interesse an der Lage räumlicher Objekte liegt in deren Bezug
zur Erdoberfläche. Eine zentrale Aufgabe, mit der sich die Wissenschaftsgebiete Geodäsie und
Kartographie beschäftigen, ist die Erfassung, Dokumentation und Darstellung von Oberflächenform,
-größe, -gestalt und -beschaffenheit der Erdoberfläche. |
|
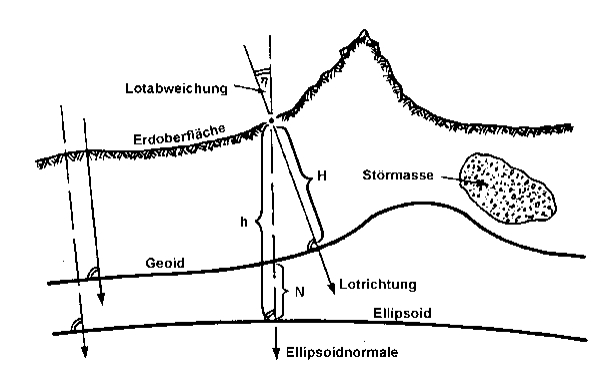
Die Erdoberfläche ist eine komplexe, nicht stetige räumliche Fläche (Abb.1). Sie entspricht
einer
mathematisch nicht exakt beschreibbaren Fläche. In der Erdmessung versucht man mathematisch
beschreibbare Bezugsflächen zu definieren, welche die Erdoberfläche bestmöglich approximieren.
Traditionell erfolgt dabei eine Trennung von Lage- und Höheninformation.
Zur Beschreibung der Lage von Objekten verwendet man hierzu Kugel oder Rotationsellipsoid.
Diese sind mathematisch relativ einfach definiert, besitzen in der Natur jedoch kein Äquivalent. Die
Koordinaten auf dem Ellipsoid sind geographische (ellipsoidische) Länge lambda und Breite phi und
ellipsoidische Höhe h (Abb. 2d). Für die Höhe verwendet man das Geoid, eine kartoffelförmige
Oberfläche, welche die unterschiedliche Massenverteilung der Erde widerspiegelt. Die Höhe
bezüglich dem Geoid heißt orthometrische Höhe H (Abb. 1) und entspricht annähernd der
Gebrauchshöhen, welche man mit der Methode des Nivellements bestimmt. Das Geoid ist als
Äquipotentialfläche der Schwere definiert und entspricht der mittleren Meeresoberfläche. Das Geoid
kann geometrisch durch die Geoidundulation N als Abweichung vom Rotationsellipsoid beschrieben
werden (Abb. 1).
Die Bezugsflächen werden in einem erdfesten Bezugssystem gelagert. Das erdfeste
Bezugssystem wird durch den Schwerpunkt S der Erde, der Erdachse und der Richtung des
Nullmeridian durch Greenwich festgelegt. Das geodätische Datum legt Größe, Form, Lage und
Orientierung der Bezugsfläche fest. Die meisten Staaten erstellten unabhängig voneinander eigene
Bezugssysteme für die Landesvermessung und besitzen somit ein eigenständiges geodätisches
Datum (z.B. [Torge 75]).
|
Ellipsoidname
|
|
Große
Halbachse
a [m]
|
Kleine
Halbachse
b [m]
|
Abplattung
f = (a-b) / a
|
|
Bessel
|
1841
|
6377397.155
|
6356078.963
|
1:299.15
|
|
Internationales von
Hayford
|
1928/
1909
|
6378388
|
6356911.946
|
1:297.0
|
|
Krassowskij
|
1940
|
6378245
|
6356863.019
|
1:298.3
|
|
WGS 84
|
1984
|
6378137
|
6356752.31
|
1:298.26
|
Tabelle 3.1: Beispiele für Rotationsellispoide
Kugel- und Rotationsellipsoidoberfläche sind gekrümmte Flächen. Diese eignen sich
in der Praxis
nicht zur Beschreibung der Lage, da ihnen eine komplexe Metrik zugrunde liegt. Deshalb bildet
man die Bezugsfläche mit Hilfe einer Kartenprojektion in die Ebene (x,y) ab. Man wählt dabei eine
Abbildungsfläche, welche sich gut an die Bezugsfläche anschmiegt und sich verzerrungsfrei in der
Ebene abrollen läßt. Es sind dies Zylinder, Kegel und Ebene. Die Kartenprojektion ist eine
Abbildungsvorschrift zwischen Bezugsfläche und Abbildungsfläche, welche nicht verzerrungsfrei ist.
Eine Kartenprojektion kann nicht gleichzeitig längen-, winkel- und flächentreu sein. Daraus
resultiert eine Vielzahl von Kartenprojektionen mit eigener Charakteristika, welche die
unterschiedlichen Anforderungen an die geometrischen Verzerrungen und die Abdeckung eines
geographischen Raum erfüllen (Siehe z.B. [Snyder 87], [Hake/Grünreich 94], [Voser 95b]).
|
|
Welt
|
Hemisphäre
|
Kontinent
|
Regional
|
Mittlere
Maßstäbe
|
Große
Maßstäbe
|
|
konform
|
Mercator
transversale
Mercator
schiefachsige
Mercator
|
stereographische
Projektion
|
Mercator
schiefachsige
Mercator
Lambert Kegel
stereographisch Projektion
|
Lambert Kegel
Mercator
schiefachsige
Mercator
transversale
Mercator
stereographische Projektion
UTM
|
Lambert
Kegel
transversale
Mercator
schiefachsige Mercator
UPS
UTM
|
Lambert Kegel
Mercator
transversale
Mercator
schiefachsige
Mercator
UPS
UTM
|
|
flächentreu
(äquivalent)
|
Lambert, zyl.
Eckert IV,VI
Mollweide
Sinusoidal
|
Lambert
azimutal
|
Albers Kegel
Bonne
Lambert
azimutal
Sinusoidal
|
Albers Kegel
Lambert
azimutal
|
Albers Kegel
|
|
|
äquidistant
|
Azimutal-
projektion
|
Azimutal-
projektion
|
Azimutal-
projektion
|
Azimutal-
projektion
|
|
|
|
vermittelnd
|
Miller, zyl.
Robinson
|
|
|
|
|
|
Tabelle 3.2: Aufstellung von Kartenprojektionen
nach Gebietsabdeckung und Abbildungseigenschaften |
|
Ein Punkt an der Erdoberfläche läßt sich durch seine räumliche Lage (kartesische Koordinaten
P3D(X,Y,Z) oder ellipsoidische
Koordinaten P3D(lambda,phi,h))
und durch den Einfluß der Schwere
beschreiben. Eine geometrische Komponente der Schwere ist die Lotrichtung. Die Lotrichtung wird
durch astronomische Länge Lambda und Breite Phi beschrieben. Die Differenz zu den
ellipsoidischen Koordinaten definiert die Lotabweichung (xi oder dLambda, eta oder dPhi). Die Form
des Geoides kann durch die Geoidundulation beschrieben werden. Als praktische Größe ist die
Orthometrische Höhe H jedoch zweckmäßiger. Die von der Schwere abhängigen Größen
N(lambda,phi), xi(lambda,phi), eta(lambda,phi) sind physikalisch und mathematisch modellierbar
und abhängig von deren Lage. Im Idealfall liegen für einen Punkt der Erdoberfläche 6
Größen vor,
welche durch geodätische Messungen bestimmbar sind, z.B. P"6D"(X,Y,Z,Lambda,Phi,H).
In vielen
Fällen sind Punkte jedoch nur in 2- dimensionaler Form P2D(lambda,phi)
oder in (2+1)-
dimensionaler (auch 2 1/2D) Form P"2+1"D(lambda,phi,H)
vor. Dreidimensionale Punkte P3D(X,Y,Z)
liegen vor, wenn diese z.B. mit Hilfe des Global Positioning System (GPS) gemessen worden sind. |
|
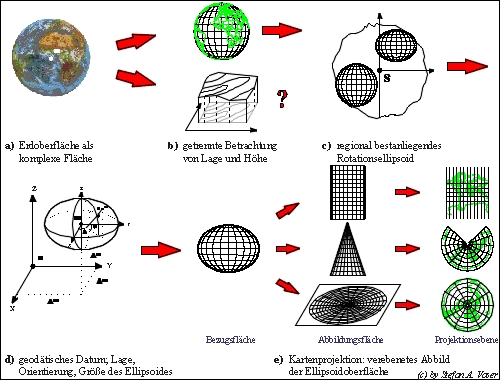
Die Erdoberfläche ist eine komplexe dreidimensionale räumliche Fläche ( Abb.
1, 2a). Die
Bestimmung und Diskretisierung der Form erfolgt durch das Einmessen von Punkten. Für die
Orientierung im Gelände unterscheidet man zwischen der Lage und der Höhe (Abb.
2b). Die Lage
bezieht sich auf die von der jeweiligen Landesvermessung festgelegte, als Rotationsellipsoid
ausgeprägte Bezugsfläche (geodätisches Datum, Abb.
2d). Die Reduktion der Lage auf der
Erdoberfläche erfolgt entlang der Ellipsoidnormale als Helmert´sche Projektion. Als Produkt
resultieren die ellipsoidischen Koordinaten, bestehend aus geographischer Länge, geographischer
Breite und ellipsoidischer Höhe. Die ellipsoidischen Koordinaten desselben Punktes unterscheiden
sich je nach verwendetem Ellipsoid. Aus den geographischen Koordinaten werden unter
Verwendung der Ellipsoidparameter und der gewählten Kartenprojektion mit deren Parametrisierung
2-dimensionale Lagekoordinaten bestimmt (Abb.
2e). Zu erwähnen sind im deutschsprachigen
Raum Gauß-Krüger-Koordinaten, UTM-Koordinaten, schweizerische Landeskoordinaten.
Zusammenfassend betrachtet sind Projektionskoordinaten ein Abbild der Erdoberfläche, wobei
Höheninformation weggelassen werden, ein geodätisches Datum verwendet wird, und für die
Abbildung vom Ellipsoid in die Ebene ein Kartenprojektion zugrunde liegt. Aus dem 3D-Raum
erfolgt i.d.R. eine nicht (exakt) umkehrbare Abbildung in eine 2D-Ebene, weil Ungenauigkeiten der
physikalischen und mathematischen Modelle einfließen und Vernachlässigungen hingenommen
werden.
|
|
P3D(X,Y,Z)
|
|
P2D(x,y)
+ hell(x,y)
|
bei echten 3D-Koordinaten
|
|
|
P"2+1"D(lambda,phi,H)
|
|
P2D(x,y)
+ H(x,y)
|
bei 2 1/2D- Koordinaten
|
|
|
P2D(lambda,phi)
|
|
P2D(x,y)
|
bei 2D-Koordinaten
|
|
|
|
|
|
|
|
|
Lagekoordinaten von Geodaten sind i.d.R. in einem ebenen und metrischen Koordinatensystem
definiert. Die Ausnahme bilden geographische Koordinaten (lambda,phi), welche einer
mathematischen, räumlichen Richtung entsprechen. Zu den metrischen 2D-Koordinaten gehören:
- mathematisches rechtwinkliges Koordinatensystem
oder Polarkoordinaten
- geodätisches ebenes Koordinatensystem:
ebene Landeskoordinaten
- örtliches (lokales) Koordinatensystem
- Kartenblattkoordinaten
- Bildkoordinaten
- Digitalisiertischkoordinaten
- Bildschirmkoordinaten.
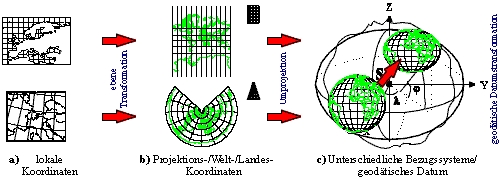
Beim Prozeß der Georeferenzierung liegen die Geodaten oft in einem lokalen Koordinatensystem
vor. In einem ersten Schritt sind diese in ebene Projektionskoordinaten zu transformieren ( Abb.
3a). Ist die Kartenprojektion mit Parametrisierung bekannt, kann die Umrechnung
auf die
Bezugsfläche erfolgen (Abb.
3b). Beim Zusammenführen von Geodaten unterschiedlicher
geodätischer Bezugssysteme ist eine Datumstransformation erforderlich (Abb.
3c). |
|
Die ebene Transformation zwischen zwei Koordinatensystemen kann an eine Vielzahl von
Bedingungen geknüpft sein. Wie bei Kartenprojektionen treten unterschiedliche Verzerrungen auf.
Geometrische Bedingungen können sein:
- Geradentreue
- Parallelentreue
- Winkeltreue
- Flächentreue
- Längentreue
- Kreistreue
- ausgewählte Punkte müssen definierte
Koordinaten erhalten
|
Transforma-
tionsart
|
Geraden-
treue
|
Parallele-
treue
|
Winkel-
treue
|
Flächen-
treue
|
Längen-
treue
|
Kreis-
treue
|
Maßstab
|
benötigte
Punkte*
|
|
projektiv
|
x
|
o
|
o
|
o
|
o
|
o
|
|
4
|
|
affin
|
x
|
x
|
o
|
o
|
o
|
o
|
m1,
m2.
|
3
|
|
ähnlich
|
x
|
x
|
x
|
o
|
o
|
o
|
1
|
2
|
|
krummlinig
|
o
|
o
|
o
|
o
|
o
|
o
|
|
n
|
Komponenten der Ähnlichkeitstransformation
|
Transforma-
tionsart
|
Geraden-
treue
|
Parallele-
treue
|
Winkel-
treue
|
Flächen-
treue
|
Längen-
treue
|
Kreis-
treue
|
Maßstab
|
benötigte
Punkte*
|
|
Translation
|
x
|
x
|
x
|
x
|
x
|
x
|
1
|
1
|
|
Rotation
|
x
|
x
|
x
|
x
|
x
|
x
|
1
|
2
|
|
Streckung
|
x
|
x
|
x
|
o
|
o
|
o
|
m
|
2
|
Tabelle 3: Auswahl von geometrischen
2D-Transformationen und deren Eigenschaften
Für die Transformation lokaler Koordinaten in Projektionskoordinaten wird i.d.R. Geradentreue,
Parallelentreue, und Winkeltreue angestrebt. Die Ähnlichkeitstransformation, auch
als
Helmerttransformation bekannt, hat diese Eigenschaften. Sie besteht aus zwei Translationen, einer
Rotation und einer Strekung. Ist bekannt, daß Pläne und Karten infolge von Alterung
und
Feuchtigkeit einen Verzug besitzen, so wird die Affintransformation angewendet. Ein Verzug läßt
sich beschreiben durch zwei Hauptmaßstäbe und die Verscherung (Maß der Winkelverzerrung).
Es
entspricht der Abweichung des Abbildes der Ursprungskoordinatenachsen vom Rechten Winkel.
Dazu gehören noch zwei Translationen und eine Rotation. Transformationen erfolgen i.d.R. unter
Zuhilfenahme von Paßpunkten. Dies sind Punkte, die in beiden Systemen bekannt sind. Als
Paßpunkte werden verwendet:
- geodätische Festpunkte
- Koordinatengitterpunkte (Punkte runder
Koordinatenwerte der Projektionskoordinaten)
- Kartennetzpunkte (Punkte mit bekannter
geographischer Länge und Breite)
- natürliche charakteristische Punkte
(Straßenkreuzungen, Flußmündungen ...)
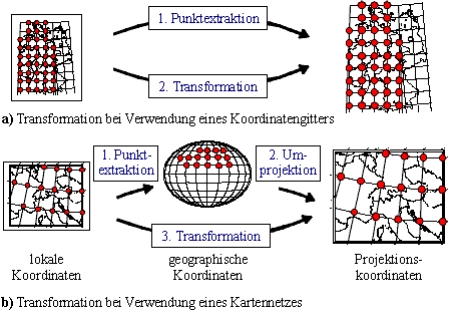
Liegen die Koordinatengitter- und Kartennetzpunkte oder -linien digital vor, läßt
sich der
Transformationsprozeß teilweise automatisieren. Sind die Punkte nicht explizit vorhanden, so
lassen sie sich als Linienschnittpunkte extrahieren. Durch Zuweisen der originalen
Koordiantenwerte zu Koordinatengitterpunkte erhält man direkt die Paßpunkte in
Projektionskoordinaten ( Abb. 4a).
Bei Kartennetzpunkten erhält man Punkte auf dem zugehörigen
Ellipsoid in geographischer Länge und Breite. Durch die Kenntnis der Kartenprojektion lassen sich
diese ebenfalls in Projektionskoordinaten projizieren (Abb.
4b). |
|
Jede Karte ist einer Kartenprojektion, und damit den zugehörigen metrischen
Verzerrungseigenschaften unterworfen. Sind diese Informationen nicht bekannt, ist eine metrische
Interpretation nicht möglich. Einem guten Kartenwerk oder Geodatensatz ist die Information über
die Kartenprojektion somit beigeführt. Bei vielen analogen Karten ist diese Information nicht oder
unvollständig vorhanden, teils aus Fahrlässigkeit oder aus strategischen Gründen.
Sind alle Parameter einer Kartenprojektion bekannt, ist eine numerische Umprojektion
sehr einfach
und entspricht dem Idealfall. Fehlen die Projektionsparameter, so sind Näherungsverfahren
anzuwenden. Ist das Kartennetz vorhanden, können Näherungsverfahren verwendet werden, wie
z.B. Lagrange- und Spline- Interpolationen [Brandenberger 85]. |
|
Eine Datumstransformation überführt die Geometrie von einem Bezugssystem zum nächsten.
Es
erfolgt eine Berücksichtigung der Lage, Orientierung und Größe der Bezugsellipsoide. Die
Parametrisierung von Datumstransformationen erfolgt im räumlich-kartesischen Raum. Die
folgenden zwei Verfahren werden dabei verwendet:
- räumliche Ähnlichkeitstransformation
(Helmert- Transformation, Bursa-Wolf-Methode, 7-
Parameter_Transformation; 3 Verschiebungen, 3 Drehungen, 1 Maßstab)
- räumliche Translation (Molodensky,
3-Parameter- Transformation; 3 Verschiebungen)
Der exakte mathematische Weg der Datumstransformation ist die Umwandlung von ellipsoidischen
Koordinaten in räumlich kartesische. Diese kartesischen Koordinaten werden der räumlichen
Datumstransformation vom Koordinatensystem mit Nullpunkt O1 ins System mit Nullpunkt O2
unterworfen.
Die Datumstransformation erfolgt anhand der im Raum verteilten Paßpunkte. Diese werden
in
ellipsoidische Koordinaten umgewandelt (Fall I). Zu beachten ist hierbei, daß die ellipsoidischen
Höhen h jeweils von der Lagerung, Form und Orientierung des Ellipsoides abhängen und nicht
identisch sind. Die Transformation erfolgt ohne Verlust geometrischer Informationen. Sind die
ellipsoidischen Höhen h nicht bekannt, jedoch Gebrauchshöhen H, kann das selbe Verfahren
verwendet werden (Fall II). Dabei ist bei den transformierten Höhen Vorsicht geboten. Z.B. würden
sich so die Höhen eines mittransformierten Geländemodelles ändern. Im klassischen Fall, d.h. es
liegen nur Lageinformationen vor (Fall III), wird die Transformation anhand der Fußpunkte auf dem
Ellipsoid, welche in räumliche kartesische Koordinaten transformiert werden, vorgenommen.
|
(I)
|
P3D(lambdaO1,phiO1,hO1)
|
|
P3D(XO1,YO1,ZO1)
|
|
P3D(XO2,YO2,ZO2)
|
|
P3D(lambdaO2,phiO2,hO2)
|
|
|
|
|
|
|
|
|
wobei hO1
<> hO2
|
|
(II)
|
P3D(lambdaO1,phiO1,HO1)
|
|
P3D(XO1,YO1,ZO1)
|
|
P3D(XO2,YO2,ZO2)
|
|
P3D(lambdaO2,phiO2,HO2)
|
|
|
|
|
|
|
|
|
wobei HO1
<> HO2
|
|
(III)
|
P3D(lambdaO1,phiO1,0)
|
|
P3D(XO1,YO1,ZO1)
|
|
P3D(XO2,YO2,ZO2)
|
|
P3D(lambdaO2,phiO2,0)
|
|
|
|
|
|
|
|
|
H wird übernommen
|
Die Bestimmung des geodätischen Datums ist eine hoheitliche Aufgabe, und die exakten
Parameter werden in vielen Fällen aus strategischen Gründen nicht veröffentlicht.
|
Bezugssystem
|
Deutschland/
DHDN1
|
ehem. DDR
|
militärisch
/Nato
|
ETRS89/DREF91
|
|
Ellipsoid
|
Bessel
|
Krassowskij
|
International
1909
|
GRS802
|
|
Datum
|
Potsdam Datum83
Rauenberg
|
System 42/83
Pulkow
|
Europäisches
Datum ED50
|
ETRF89
|
|
Projektion
|
Gauß-Krüger-
Koordinaten in 3°-
breiten Meridian-
streifen
|
Gauß-Krüger-
Koordinaten in 6°-
breiten Meridian-
streifen
|
UTM
in 6°-breiten
Meridianstreifen
|
UTM
in 6°-breiten
Meridianstreifen
|
1 DHDN - Deutsches HauptDreiecksnetz;
2 Geodetic Reference System 80-Ellipsoid; stimmt bis auf Millimeter mit dem WGS-84 -Ellipsoid überein
Tabelle 4: Die geodätischen Bezugssysteme
in Deutschland |
|
|
|
|
|
|
|
Die Verwendung von Kartenprojektionen hängt von der jeweiligen Anwendung und den
Anforderungen an die geometrischen Verzerrungen ab. Tabelle 2 zeigt eine Auswahl von
Kartenprojektionen. In großmaßstäbigen Anwendungen (z.B. Grundbuch, Leitungskataster) und bei
mittleren Maßstäben (z.B. topographische Karten) und bei der Navigation werden winkeltreue
Kartenprojektionen verwendet. Für kleinmaßstäbige Karten der thematischen Kartographie, werden
mehrheitlich äquidistante und flächentreue Projektionen verwendet. Es ist von Vorteil, wenn dabei
dieselben (maßstabsabhängigen) Projektionsparameter der amtlichen und internationalen
Kartenwerke verwendet werden, um die Übernahme und das Zusammenführen von Geodaten zu
vereinfachen. Tabelle 5 zeigt einen Vorschlag für die Verwendung von Kartenprojektionen für
unterschiedlicher Maßstäbe.
|
Maßstabsbereich
|
Projektion
|
|
große
Maßstäbe
|
- Gauß-Krüger-Koordinaten= transversale Mercator
(D, A)
- schiefachsige Mercator- Projektion (CH)
|
|
mittlere
Maßstäbe
|
- Gauß-Krüger-Koordinaten= transversale Mercator
(D, A)
- schiefachsige Mercator- Projektion (CH)
|
|
kleine
Maßstäbe
|
|
|
|
Region
/Länder
|
- Flächentreue Kegelabbildung von Albers
- Flächentreue Azimutalabbildung von Lambert
(polare Gebiete)
|
|
|
Kontinent
|
- Flächentreue Kegelabbildung von Albers
- Flächentreue Azimutalabbildung von Lambert
(polare Gebiete)
|
|
|
Hemisphäre
|
- Flächentreue Azimutalabbildung von Lambert
|
|
|
Welt
|
- Eckert (IV, VI)
- Hammer-Aitoff
- Mollweide
- Sinusoidal
|
Tabelle 5: Vorschlag für Kartenprojektionen
[Voser 95b] |
|
In den Kapiteln 3 und 4 sind die Grundlagen und Transformationsschritte zum Herstellen
eines
einheitlichen Bezugssystemes zusammenfassend dargestellt. Es ist noch zu klären, in welchen
Koordinaten die Lageinformationen verwaltet werden sollen. Da jede Projektion zu Verzerrungen
führt, und innerhalb von Kartenwerken unterschiedliche Parametrisierungen und unterschiedliche
Projektionen verwendet werden, empfiehlt es sich, alle Geodaten in geographische Koordinaten zu
verwalten. Tabelle 6 zeigt eine Gegenüberstellung von Vor- und Nachteilen geographischer
Koordinaten.
|
Vorteile
|
Nachteile
|
- weltweit einheitliche Koordinaten
- keinen Projektionsstreifen zugehörig
- geogr. Koordinaten sind
Ausgangskoordinaten für jede
Kartenprojektion
- metrikunabhängig (Positionsangabe
als
räumlich Richtung gegeben)
- unterliegen keiner Kartenprojektion
- "verzerrungsfrei" (keine
Projektionsverzerrungen durch einen
Kartennetzentwurf)
- Umrechnung in gewünschte Projektion
einfach automatisierbar
- Darstellungsunabhängig, d.h. keine
Ungewissheit, welche
Verzerrungseigenschaften der zugehörigen
Projektion zugrundeliegen
- Anwendungsunabhängig, da keine
metrischen Bedingungen zugrundeliegen
|
- Kenntnis der geodätischen Grundlagen
und
Kartenprojektion für jede Datengrundlage
erforderlich
- Sehr aufwendig Transformation, wenn
die
Transformationsparameter nicht bekannt
sind
- Erlauben keine direkte Ableitung
metrischer
Infor mationen wie Distanzen oder
Flächeninhalte
- Bei jeder Betrachtung ist vorher
eine
Projektion festzulegen (dies jedoch
automatisierbar)
- in geogr. Koordinaten können keine
Mindestgrößen definiert werden; d.h. die
Koordinatenwerte sind nicht direkt
interpretierbar
WICHTIG!
Geographische Koordinaten beziehen sich stets
auf ein Ellipsoid mit zugehörigem geodätischem
Datum!
|
Tabelle 6: Vor- und Nachteile geographischer
Koordinaten als einheitliche Koordinaten |
|
Das Zusammenführen von Geodaten unterschiedlicher Herkunft zur gemeinsamen Nutzung
verlangt
einheitliche geometrische Grundlagen. Die Grundlagen hierfür sind die geodätischen
Bezugssysteme. Für die Lageinformation wird als Bezugsfläche ein Rotationsellipsoid mit
zugehörigen geodätischen Datum verwendet. Für die Höhe wird als Bezugsfläche das Geoid
verwendet. Die Abbildung der Lage vom Ellipsoid in die Ebene erfolgt mit Hilfe unterschiedlicher
Kartenprojektionen.
Beim Prozeß der Georeferenzierung sind infolge der unterschiedlichen geometrischen
Grundlagen
Koordinatentransformationen notwendig. Es sind dies ebene Transformationen zum Einpassen
ebener Koordinaten in übergeordnete Koordinatensysteme, geodätische Datumstransformationen
sowie Kartenprojektionen zum Umwandeln von ebene Koordinaten in geographische Koordinaten
und vice versa. |
|
Brandenberger 85 - Brandenberger,
Christoph G.; Koordinatentransformation für digitale
kartographische Daten mit Lagrange- und Splineinterpolation; Institut für Kartographie, ETH Zürich.
Hake/Grünreich 94 - Hake, G.;
Grünreich, D.; Kartographie, 7.Auflage, Walter de Gruyter Verlag,
Berlin, 1994.
Heck 87 - Heck, Bernhard; Rechenverfahren
und Auswertemodelle der Landesvermessung; Herbert
Wichmann Verlag, Karlsruhe, 1987
Snyder 87 - Snyder, John P.; Map Projections
- A working manual; U.S. Geological Survey
Professional Paper 1395; Washington 1987
Torge 75 - Torge, Wolfgang; Geodäsie;
Walter de Gruyter Verlag, Berlin 1975.
Voser 95a
- Voser, Stefan A.; Datenaustausch zwischen Geo-Informationssystemen - Abbildung
zwischen zwei Datenmodellen auf konzeptioneller und logischer Ebene; 3. deutsches. Arc/Info-
Anwendertreffen, 1995.
Voser 95 b - Voser, Stefan A.; Geodätische
Bezugssysteme - Teil 1, Geodätische Grundlagen; 1.
Zwischenbericht zu "Untersuchung über die Nutzungsmöglichkeiten verschiedener geodätischer
Bezugssysteme für Geo-Informationssysteme des Naturschutzes", F+E-Vorhaben 808 01 135,
Bundesamt für Naturschutz, Bonn; unveröffentlicht.
Voser 96 - Voser, Stefan A.; Geodätische
Bezugssysteme - Teil 2, geometrische
Transformationen; 2. Zwischenbericht zu "Untersuchung über die Nutzungsmöglichkeiten
verschiedener geodätischer Bezugssysteme für Geo-Informationssysteme des Naturschutzes",
F+E-Vorhaben 808 01 135, Bundesamt für Naturschutz, Bonn; unveröffentlicht. |
|
|
|
|
|
 related information
related information